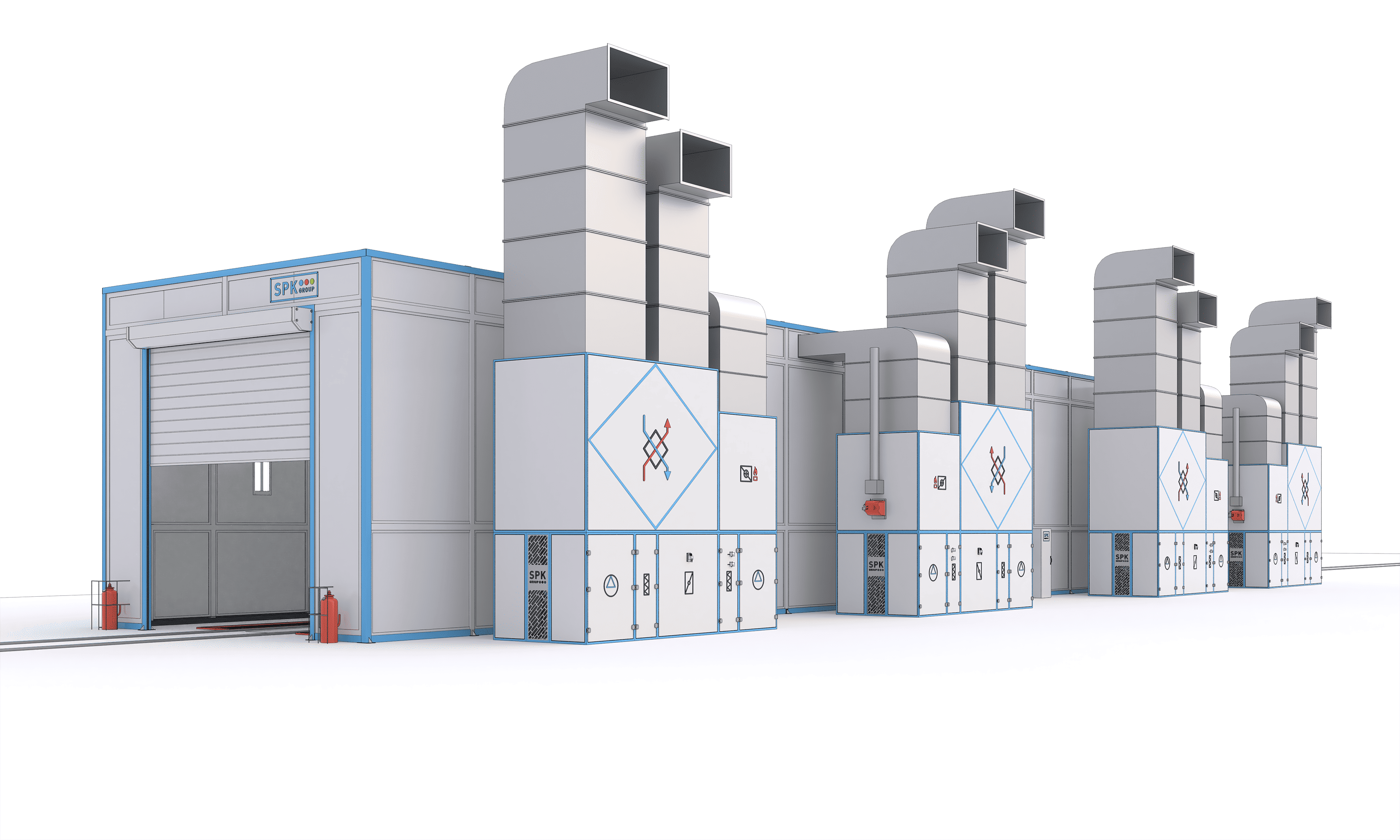
Роботизированная дробеструйная камера SPK-SBB-25.8.10




Роботизированный дробеструйный комплекс SPK-SBB-25.8.10: подробный технический обзор
Роботизированный комплекс SPK-SBB-25.8.10 представляет собой высокотехнологичное промышленное решение, спроектированное для автоматической и ручной абразивоструйной обработки наружных и внутренних поверхностей крупногабаритных грузовых вагонов и стальных кузовов.
Основная задача комплекса — эффективная очистка металлоконструкций от окалины, ржавчины и других окислов, а также создание оптимального микрорельефа (шероховатости) для последующего нанесения лакокрасочных покрытий в строгом соответствии со стандартом Sa 2 ½.
Режим работы и производительность оборудования
Комплекс адаптирован для интенсивной эксплуатации в условиях крупносерийного производства и имеет следующие расчетные параметры:
-
Годовой фонд рабочего времени: 4 074 часа.
-
Сменность: 2 смены по 8 часов.
-
Коэффициент использования оборудования (КИО): 0,85.
-
Годовой объем обработки: 1 000 кузовов.
-
Суммарная площадь обработки: 450 000 м²/год.
Режимы работы дробеструйного комплекса
Система поддерживает гибкую организацию производственного цикла благодаря двум режимам работы:
-
Автоматический режим. Очистка выполняется портальным абразивоструйным роботом по заданной управляющей программе без прямого участия человека.
-
Ручной режим. Внутри камеры оборудованы 2 стационарных поста для ручной доработки или автономной очистки операторами.
⚠️ Безопасность: Для исключения производственного травматизма система управления оснащена аппаратной блокировкой. Она полностью исключает возможность запуска автоматического цикла робота, если в камере активированы посты ручной обработки.
Характеристики обрабатываемых изделий
Комплекс является универсальным и позволяет подготавливать грузовые вагоны различной конфигурации: полувагоны, платформы, вагоны-хопперы для сыпучих грузов и др.
-
Максимальные габариты изделия (ДхШхВ): 19 750 × 3 296 × 4 908 мм.
-
Максимальная масса кузова: 28 тонн.
-
Толщина обрабатываемого металла: от 3 до 30 мм.
-
Материал изделий: конструкционная низколегированная сталь 09Г2С.
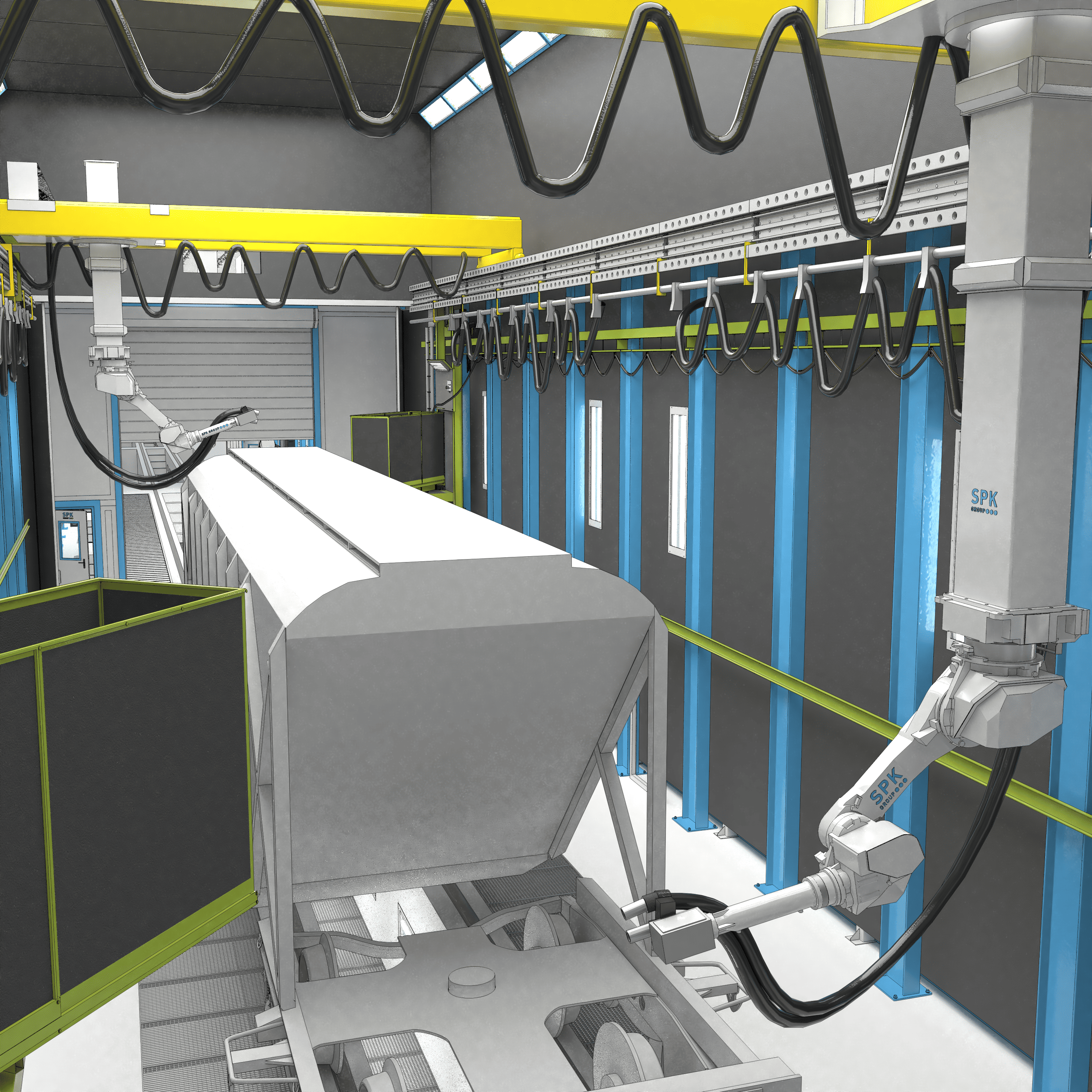
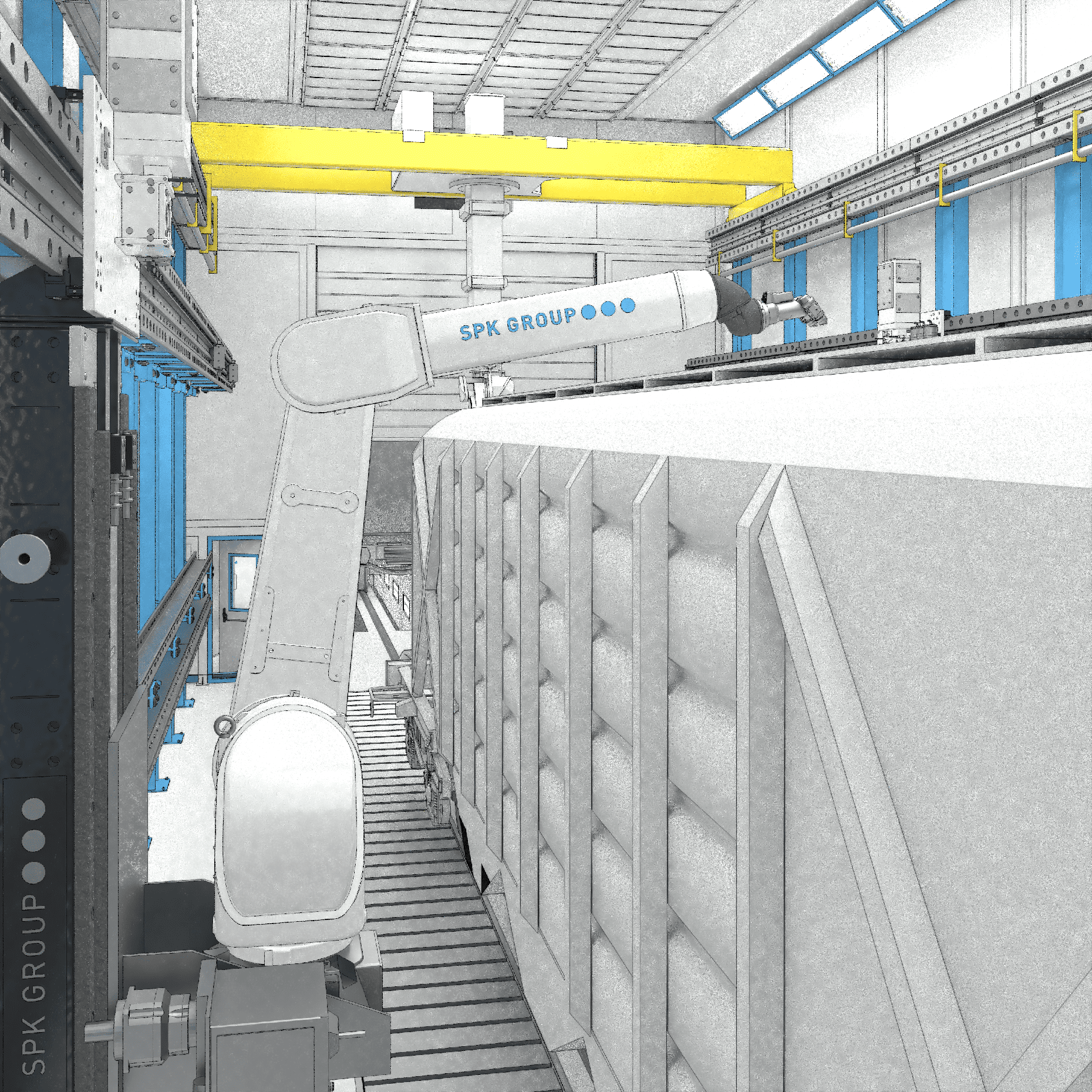
Портальный абразивоструйный робот B20S
Автоматическую очистку выполняет мощный 8-осевой портальный робот B20S. Его корпус изготовлен из сверхпрочной износостойкой стали марки HARDOX (твердость 570–640 HBW), что позволяет эксплуатировать машину в агрессивной среде без использования защитных чехлов и оболочек.
Оснащение и рабочие органы
-
Рабочий инструмент: 2 дробеструйных сопла диаметром ø19 мм.
-
Рабочее давление воздуха: 0,6–1,0 МПа.
-
Ресурс непрерывной работы сопла: ~800 часов.
-
Приводы и электрика: высокоточные серводвигатели под управлением центрального процессора (ЦП).
-
Программное обеспечение: переносной пульт управления с контроллером и 1 лицензия на софт для офлайн-программирования с выделенным рабочим местом (ПК).
Конструктивные особенности и безопасность робота
-
Защита направляющих: Мост робота перемещается по верхним рельсам и оснащен двухсторонними щеточными элементами для автоматической очистки путей от пыли и рикошетирующей дроби.
-
Удобство обслуживания: В конструкции моста предусмотрен технологический проход (высота от пола прохода до крыши камеры — не менее 2 м).
-
Финальная очистка: Интегрирована функция автоматического обдува кузова сжатым воздухом для удаления остатков дроби и пыли после завершения цикла.
-
Энергобезопасность: ЦП Beckhoff укомплектован источником бесперебойного питания (ИБП). Система мгновенно сохраняет целостность ПО и текущие координаты осей при внезапном отключении электричества или сбоях в пневмосистеме.
-
Аварийный останов: При несанкционированном входе персонала в рабочую зону во время автоматического цикла робот экстренно останавливается. После перезапуска цикл продолжается строго с точки останова.
Механизированные лифт-площадки для операторов
Для работы маляров-пескоструйщиков в ручном режиме предусмотрены две механизированные платформы. Они перемещаются по трем координатным осям (длина, ширина, высота камеры), а вылет по ширине реализуется за счет встроенного поворотного механизма люльки.
-
Габариты люльки-корзины (ДхШхВ): 1900 × 700 × 1200 мм.
-
Максимальная грузоподъемность: 150 кг.
Конструкция и эргономика площадок
-
На боковых стенах камеры закреплены жесткие направляющие с буферными упорами и ограничителями перемещения.
-
Вертикальный подъем обеспечивает надежный барабанный механизм тросового типа.
-
Защита узлов: Все приводные элементы и редукторы оснащены герметичными резиновыми уплотнениями для полной защиты от мелкодисперсной пыли и прямого рикошета дроби.
-
Управление: Разделено на внешний и внутренний блоки. Внутренний пульт расположен непосредственно в корзине, позволяя оператору самостоятельно регулировать подъем, продольный ход и угол поворота платформы в процессе работы.
Кинематика и мощность приводов платформ
| № | Направление движения площадки | Ограничение перемещения | Рабочая скорость | Тип механизма / перемещения | Мощность приводного двигателя |
| 1 | Вертикальное (вверх/вниз) | 6 м | 0,3 м/с | Линейный (тросовый барабан) | 0,75 кВт х 2 |
| 2 | Горизонтальное (вдоль камеры) | 28 м | 0,2 м/с | Линейный | 0,75 кВт |
| 3 | Вращение корзины (вокруг оси) | 0–180° | 20 °/с |